Εισάγετε μια λέξη ή φράση σε οποιαδήποτε γλώσσα 👆
Γλώσσα:
Μετάφραση και ανάλυση λέξεων από την τεχνητή νοημοσύνη ChatGPT
Σε αυτήν τη σελίδα μπορείτε να λάβετε μια λεπτομερή ανάλυση μιας λέξης ή μιας φράσης, η οποία δημιουργήθηκε χρησιμοποιώντας το ChatGPT, την καλύτερη τεχνολογία τεχνητής νοημοσύνης μέχρι σήμερα:
- πώς χρησιμοποιείται η λέξη
- συχνότητα χρήσης
- χρησιμοποιείται πιο συχνά στον προφορικό ή γραπτό λόγο
- επιλογές μετάφρασης λέξεων
- παραδείγματα χρήσης (πολλές φράσεις με μετάφραση)
- ετυμολογία
Τι (ποιος) είναι МАШИНЫ И МЕХАНИЗМЫ: ПРОСТЕЙШИЕ МЕХАНИЗМЫ - ορισμός
Машины и Механизмы
МАШИНЫ И МЕХАНИЗМЫ: ПРОСТЕЙШИЕ МЕХАНИЗМЫ
К статье МАШИНЫ И МЕХАНИЗМЫ
Простейшие механизмы можно найти почти в любых более сложных машинах и механизмах. Их всего шесть: рычаг, блок, дифференциальный ворот, наклонная плоскость, клин и винт. Некоторые авторитетные специалисты утверждают, что на самом деле можно говорить всего лишь о двух простейших механизмах - рычаге и наклонной плоскости, - так как нетрудно показать, что блок и ворот представляют собой варианты рычага, а клин и винт - варианты наклонной плоскости.
Рычаг. Это жесткий стержень, который может свободно поворачиваться относительно неподвижной точки, называемой точкой опоры. Примером рычага могут служить лом, молоток с расщепом, тачка, метла.
Рычаги бывают трех родов, различающихся взаимным расположением точек приложения нагрузки и усилия и точки опоры (рис. 1). Идеальный выигрыш в силе рычага равен отношению расстояния DE от точки приложения усилия до точки опоры к расстоянию DL от точки приложения нагрузки до точки опоры. Для рычага I рода расстояние DE обычно больше DL, а поэтому идеальный выигрыш в силе больше 1. Для рычага II рода идеальный выигрыш в силе тоже больше единицы. Что же касается рычага III рода, то величина DE для него меньше DL, а стало быть, больше единицы выигрыш в скорости.
Блок. Это колесо с желобом по окружности для каната или цепи. Блоки применяются в грузоподъемных устройствах. Система блоков и тросов, предназначенная для повышения грузоподъемности, называется полиспастом. Одиночный блок может быть либо с закрепленной осью (уравнительным), либо подвижным (рис. 2). Блок с закрепленной осью действует как рычаг I рода с точкой опоры на его оси. Поскольку плечо усилия равно плечу нагрузки (радиус блока), идеальный выигрыш в силе и скорости равен 1. Подвижный же блок действует как рычаг II рода, поскольку нагрузка расположена между точкой опоры и усилием. Плечо нагрузки (радиус блока) вдвое меньше плеча усилия (диаметр блока). Поэтому для подвижного блока идеальный выигрыш в силе равен 2.
Более простой способ определения идеального выигрыша в силе для блока или системы блоков - по числу параллельных концов каната, удерживающих нагрузку, как это нетрудно сообразить, взглянув на рис. 2.
Уравнительные и подвижные блоки можно сочетать по-разному для увеличения выигрыша в силе. В одной обойме можно установить два, три или большее число блоков, а конец троса можно прикрепить либо к неподвижной, либо к подвижной обойме.
Дифференциальный ворот. Это, в сущности, два колеса, соединенные вместе и вращающиеся вокруг одной оси (рис. 3), например, колодезный ворот с ручкой.
Дифференциальный ворот может давать выигрыш как в силе, так и в скорости. Это зависит от того, где прилагается усилие, а где - нагрузка, поскольку он действует как рычаг I рода. Точка опоры расположена на закрепленной (фиксированной) оси, а поэтому плечи усилия и нагрузки равны радиусам соответствующих колес. Пример такого устройства для выигрыша в силе - отвертка, а для выигрыша в скорости - шлифовальный круг.
Зубчатые колеса. Система двух находящихся в зацеплении зубчатых колес, сидящих на валах одинакового диаметра (рис. 4), в какой-то мере аналогична дифференциальному вороту (см. также ЗУБЧАТАЯ ПЕРЕДАЧА). Скорость вращения колес обратно пропорциональна их диаметру. Если малая ведущая шестерня A (к которой приложено усилие) по диаметру вдвое меньше большого зубчатого колеса B, то она должна вращаться вдвое быстрее. Таким образом, выигрыш в силе такой зубчатой передачи равен 2. Но если точки приложения усилия и нагрузки поменять местами, так что колесо B станет ведущим, то выигрыш в силе будет равен 1/2, а выигрыш в скорости - 2.
Наклонная плоскость. Наклонная плоскость применяется для перемещения тяжелых предметов на более высокий уровень без их непосредственного поднятия. К таким устройствам относятся пандусы, эскалаторы, обычные лестницы, а также конвейеры (с роликами для уменьшения трения).
Идеальный выигрыш в силе, обеспечиваемый наклонной плоскостью (рис. 5), равен отношению расстояния, на которое перемещается нагрузка, к расстоянию, проходимому точкой приложения усилия. Первое есть длина наклонной плоскости, а второе - высота, на которую поднимается груз. Поскольку гипотенуза больше катета, наклонная плоскость всегда дает выигрыш в силе. Выигрыш тем больше, чем меньше наклон плоскости. Этим объясняется то, что горные автомобильные и железные дороги имеют вид серпантина: чем меньше крутизна дороги, тем легче по ней подниматься.
Клин. Это, в сущности, сдвоенная наклонная плоскость (рис. 6). Главное его отличие от наклонной плоскости в том, что она обычно неподвижна, и груз под действием усилия движется по ней, а клин вгоняют под нагрузку или в нагрузку. Принцип клина используется в таких инструментах и орудиях, как топор, зубило, нож, гвоздь, швейная игла.
Идеальный выигрыш в силе, даваемый клином, равен отношению его длины к толщине на тупом конце. Реальный выигрыш клина, в отличие от других простейших механизмов, трудно определить. Сопротивление, встречаемое им, непредсказуемо меняется для разных участков его "щек". Из-за большого трения его КПД столь мал, что идеальный выигрыш не имеет особого значения.
Винт. Резьба винта (рис. 7) - это, в сущности, наклонная плоскость, многократно обернутая вокруг цилиндра. В зависимости от направления подъема наклонной плоскости винтовая резьба может быть левой (A) или правой (B). Сопрягающаяся деталь, естественно, должна иметь резьбу такого же направления. Примеры простых устройств с винтовой резьбой - домкрат, болт с гайкой, микрометр, тиски.
Поскольку резьба - наклонная плоскость, она всегда дает выигрыш в силе. Идеальный выигрыш равен отношению расстояния, проходимого точкой приложения усилия за один оборот винта (длины окружности), к расстоянию, проходимому при этом нагрузкой по оси винта. За один оборот нагрузка перемещается на расстояние между двумя соседними витками резьбы (a и b или b и c на рис. 7), которое называется шагом резьбы. Шаг резьбы обычно значительно меньше ее диаметра, так как иначе слишком велико трение.
Простейший механизм

ПРЕОБРАЗОВАТЕЛЬ НАПРАВЛЕНИЯ, МОДУЛЯ СИЛЫ
Простое механическое устройство; Простой механизм; Простые механизмы; Простая машина
Простейший механизм — это механическое устройство, изменяющее направление или величину силы. В общем, их можно определить как простейшие инструменты, которые используют механический выигрыш (также называемый рычагом) для увеличения силы.
Механизм


![[[Механизм Липкина — Посселье]]:<br />звенья, показанные одним цветом, имеют одинаковую длину](https://commons.wikimedia.org/wiki/Special:FilePath/Peaucellier linkage animation.gif?width=200 "[[Механизм Липкина — Посселье]]:<br />звенья, показанные одним цветом, имеют одинаковую длину")
![степенями свободы]].](https://commons.wikimedia.org/wiki/Special:FilePath/Transmission diagram.JPG?width=200 "степенями свободы]].")
ЧАСТЬ МАШИНЫ, НАПРИМЕР ПРИРОДНОГО - РЕЧКА
Механизмы; Плоские механизмы; Пространственные механизмы; Плоский механизм
(от греч. mechane - машина)
система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения др. тел. М. составляют основу большинства машин (См. Машина), применяются во многих приборах, аппаратах и технических устройствах. Твёрдое тело, входящее в состав М., называемое звеном, может состоять из одной или нескольких неподвижно соединённых деталей (отдельно изготовленных частей). Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой (См. Кинематическая пара) (см. также Кинематика механизмов). Наиболее распространённые кинематической пары: вращательная (шарнир), поступательная (ползун и направляющая), винтовая (винт и гайка), сферическая (шаровой шарнир). Если в преобразовании движения, кроме твёрдых тел (звеньев), участвуют жидкие или газообразные тела, то М. называют соответственно гидравлическим или пневматическим.
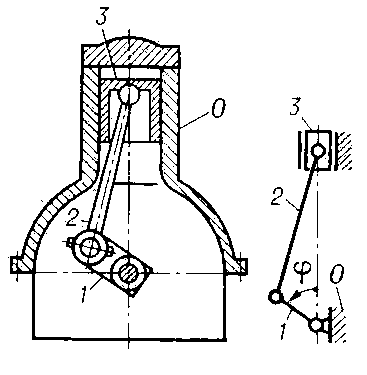
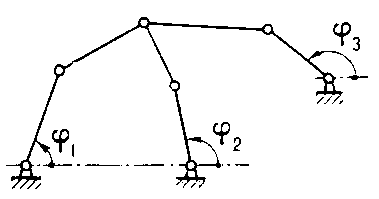
Для изучения движения звеньев М. составляется кинематическая схема, на которой указываются данные, необходимые для определения положения звеньев. На рис. 1 показан чертёж М. двигателя внутреннего сгорания и его кинематическая схема. На кинематической схеме кривошип и шатун условно представлены в виде отрезков, соединяющих центры шарниров, ползун - в виде прямоугольника, стойка О - в виде отрезка со штриховкой, изображающего направляющую ползуна, и треугольника с шарниром, имеющим неподвижную ось вращения. Для определения по кинематической схеме положения всех подвижных звеньев М. достаточно знать положение одного звена. Звено, положение которого для любого момента времени задано, называют начальным. При исследовании М. число начальных звеньев должно совпадать с числом его степеней свободы (См. Степеней свободы число), т. е. с числом независимых переменных, определяющих положения всех звеньев. М. двигателя внутреннего сгорания имеет одну степень свободы; в качестве независимой переменной для М. можно принять угол φ. В шарнирном М. с двумя степенями свободы, (рис. 2) независимыми переменными могут быть углы φ1 и φ2, или φ1 и φ3, или, наконец, φ2 и φ3.
М. применяется в тех случаях, когда нельзя получить непосредственно требуемое движение тел и возникает необходимость в преобразовании движения. Например, ротор электродвигателя и подшипники, в которых он вращается, не образуют М., т. к. в этом случае электроэнергия непосредственно преобразуется в требуемое движение без какого-либо промежуточного преобразования механического движения. М. появляется только тогда, когда требуется уменьшить угловую скорость выходного вала, т. е. устанавливается понижающая зубчатая передача. М. двигателя внутреннего сгорания преобразует прямолинейное движение поршня во вращательном движение коленчатого вала. М., предназначенный для преобразования вращательных или прямолинейных движений во вращательные (и наоборот), называется передаточным М., или передачей (См. Передача). В зависимости от вида звеньев различают зубчатые, рычажные, фрикционные, цепные, ремённые передачи. К этому же типу М. относятся гидро- и пневмопередачи. М., служащий для воспроизведения движения некоторой точки по заданной траектории, называется направляющим. Наибольшее распространение имеют М., воспроизводящие движение по прямой линии (прямолинейно-направляющие) и по дуге окружности (круговые направляющие). М., предназначенные для сложного перемещения твёрдого тела в пространстве или в плоскости, называются перемещающими.
В 60 - начале 70-х гг. 20 в. появились новые М., созданные для выполнения задач, связанных с космической техникой (М. для передачи вращения в вакууме, М. пространственной ориентации), медицинской техники (регулируемые аппараты, биопротезы), для работы в средах, недоступных или опасных для человека (подводные глубины, космос, атомные реакторы). Для выполнения этих работ нашли применение манипуляторы, основу которых составляют пространственные М. со многими степенями свободы. Развитие манипуляторов привело к созданию промышленных Роботов, позволяющих автоматизировать процессы обработки, монтажа и сборки изделий. См. также Машин и механизмов теория.
Лит.: Кожевников С. Н., Есипенко Я. И., Раскин Я. М., Механизмы, 3 изд., М., 1965; Артоболевский И. И., Механизмы в современной технике, т, 1-2, М., 1970-71.
И. И. Артоболевский, Н. И. Левитский.
Рис. 1. Чертёж (а) и кинематическая схема (б) механизма двигателя внутреннего сгорания; 1 - коленчатый вал (кривошип); 2 - шатун; 3 - ползун; О - стойка; φ - независимая переменная, угол поворота кривошипа.
Рис. 2. Схема шарнирного механизма с двумя степенями свободы (с двумя начальными звеньями).
Βικιπαίδεια
Машины и механизмы
«Машины и Механизмы» — научно-популярный журнал, издающийся в Санкт-Петербурге Фондом научных исследований «XXI век» с сентября 2005 года.
На страницах журнала публикуются статьи о новейших научных тенденциях, передовых технологиях, последних изобретениях, компьютерных технологиях, коммуникациях, загадках и тайнах, военной технике, автомобилях, истории, здоровье, путешествиях и о вопросах развития общества. В 2014 году издание было отмечено Беляевской литературной премией за наиболее интересную деятельность в течение 2013 года.